柔性制造系統實訓室建設方案
欄目分類:實訓室建設方案 發布日期:2017-10-30 瀏覽次數:次
柔性制造系統實訓室建設方案,智能制造實訓室是以工業生產中的自動化裝配生產線為原型,開發的機電一體化教學、實驗、實訓綜合應用平臺,使學生對工業生產的實際過程有大體的了解。
聯系方式見右側懸浮框
【柔性制造系統實訓室建設方案,智能制造實訓室】是根據客戶需求而寫的,非常具有代表性,在客戶搜索【柔性制造系統實訓室建設方案,智能制造實訓室】時,都能通過我們來了解相關資訊,而且【柔性制造系統實訓室建設方案,智能制造實訓室】在客戶有需求時提供參考意見。
一、柔性制造系統實訓室建設方案,智能制造實訓室簡介
1.1、柔性制造系統實訓室建設方案,智能制造實訓室概述
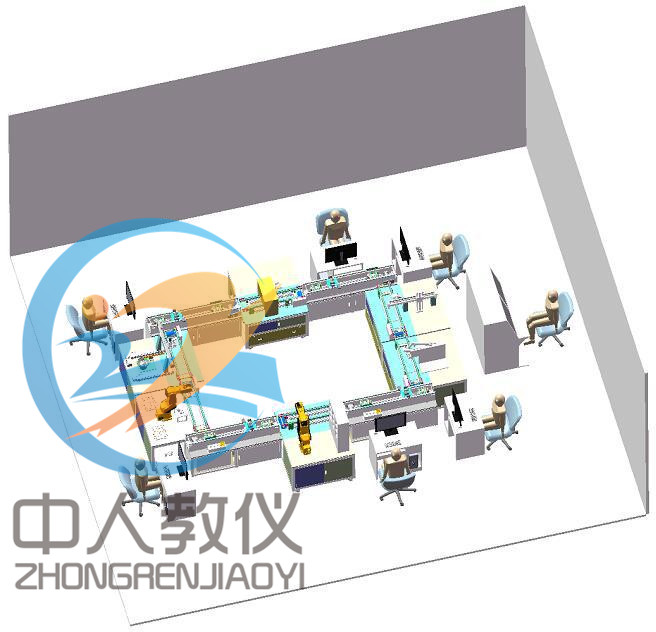
模塊化柔性生產線,是以工業生產中的自動化裝配生產線為原型,開發的機電一體化教學、實驗、實訓綜合應用平臺,使學生對工業生產的實際過程有大體的了解,掌握工業生產過程一些實際應用技術。并較好地解決了在學校期間,只接觸到以單元實驗或校外參觀實習為主,一些大型的自動化控制站只能看不能操作,達不到理想的教學效果的這個實際接觸問題。該系統是將機器人技術、視覺檢測技術、流水線技術、液壓技術,PLC控制技術、物聯網通訊技術RFID和系統工程有機的融于一體,是現今工業自動化流水線柔性系統的縮影。整個軟件系統,整合了控制軟件,視覺軟件,MES軟件,機器人仿真軟件,數字工廠仿真軟件等。軟件功能充分體現工業4.0的應用功能。它既符合工業自動化生產實際又能滿足高校自動化控制、機器人等專業創新、實驗、實訓教學需要。
系統由6個基本站組成:起始流水線換向工作站、六關節機器人上下料站、四關節機器人組裝站、視覺QC測檢站、倉儲管理工作站、終止流水線換向工作站。涵蓋了多種機器人:六關節機器人、四關節機器人,直角機器人等。工件放置在載具上,載具在流水線上循環流動。載具在每個工站上精確定位,并在載具上完成零件裝配。實現的業務功能是:按產品的工藝路線,把多個零件從料盤進料,并精密裝配成一個完整產品。并對產品視覺檢測,對不合格品移到不良區,對合格品格存放到智能倉庫里。系統采用工業級流水線設計,符合實際工業生產的節拍與精度要求。可根據用戶需求對各種工作站修改定制。采用模塊化結構設計,每個單元完成特定的工作,并可獨立運行。各工作站組合方便,不僅可以拆開進行各類單線技能訓練,還可以快速組合,進行綜合性項目訓練。最大程度的地滿足了實訓教學、工程訓練的需求。
控制系統采用MITSUBISHI公司的Fx3u系列PLC。每個工作站的控制單元由PLC、傳感器、執行機構、流水線傳送機構組成。PLC根據輸入信號和用戶程序,執行相應的計算和控制過程,并輸出各種控制信號,實現対各單元的自動控制。每個工作單元PLC都裝有組態監控軟件,監控本模塊的運行。
MES系統集成了數據采集模塊,品質模塊,定單模塊,設備維護模塊,報表模塊,看板模塊。MES系統通過RS485總線,連接每站的PLC。通過Modbus實現對每部的工作過程數據管理,MES實時采集PLC工作過程數據。把生產的進展數據,通過看板顯示在大屏幕上。并可通過APP實時查看生產進展。
系統配套的機器人仿真軟件,是一套功能強大的機器人離線編程仿真軟件。可從CAD模型獲取工件軌跡,優化后自動生成機器人代碼。并可直接倒入目標機器人中運行,也支持目標機器人語言直接編程。從模型到執行代碼一站式解決。通過集成的3D仿真功能,建立一個與實際環境相同的虛擬開發環境,并集成了豐富的工藝應用工具包。是一套解決機器人系統設計、仿真、離線編程的工具,能夠適應各種機器人。
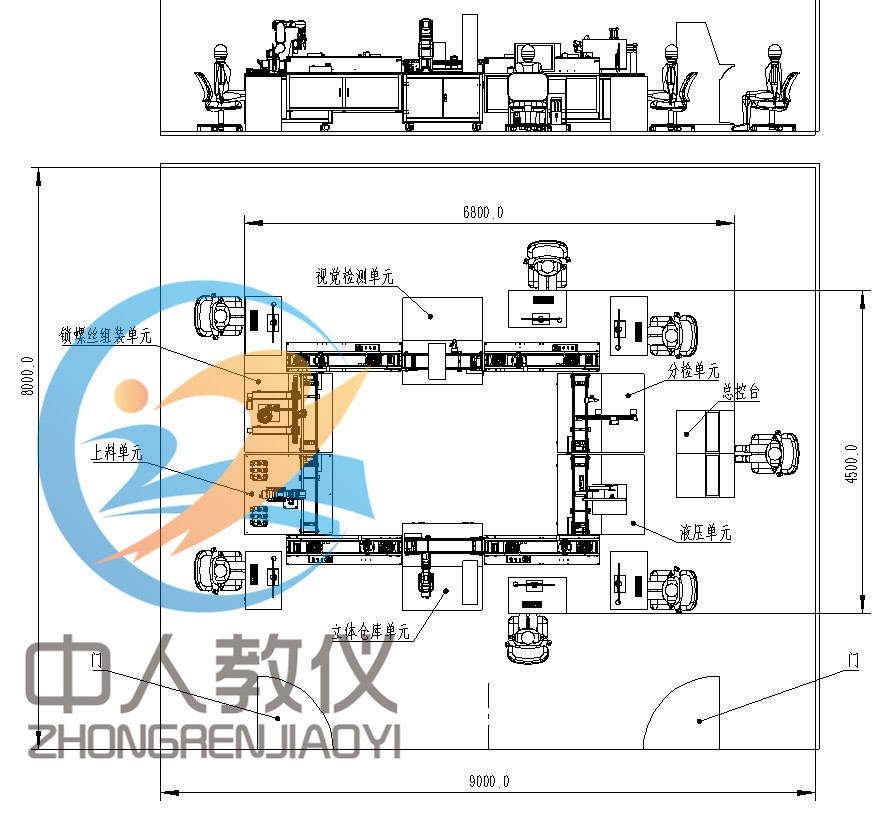
1.2、環線型部署
說明:
該方案包括上料單元(6關節)、法蘭安裝單元(直角)、視覺檢測單元(RFID)、液壓單元、分檢單元(氣動直角)、入庫(6關節)、總控臺、MES系統。此布局呈口字直線型安裝,每站之間相互連接固定,整體結構簡潔清爽易實訓觀察,更方便維修。
備注:以上示意圖不代表與實物完全相同。
1.3、氣電系統需求
1.3.1、氣源
空壓機主要參數1)功率≥750W;
2)壓力≥0.7MPa;
3)排氣量≥60L/Min;
4)容量≥18L;
5)外形尺寸:450×210×450mm,長、寬、高偏差在±5mm以內。
1.3.2、電源
1)輸入電源:單相三線AC220V ±10% 50Hz,裝置容量:<5kVA;2)工作環境:環境溫度范圍為-5℃~+40℃ 相對濕度<85%(25℃)
1.3.3、液壓系統
液壓泵主要參數1)功率≥550W;
2)電機:220V加電容;
3)工作壓力≥6.3MPa;
4)油箱容量≥7L;
5)高壓流量≥0.27L/Min;低壓流量≥1L/Min。
二、總體方案介紹
2.1、標準工作臺設計
模塊化柔性自動化生產線實訓系統是一種最為典型的機電一體化系統,適合相關專業學生進行工程實踐、課程設計及初上崗位的工程技術人員進行培訓。本次方案對柔性線進行模塊化設計,由多個獨立的工作站組成,其中各站的工作臺進行標準化設計。標準工作臺由標準工作臺機體、標準上層輸送線、標準下層輸送線三部分組成。說明:
1)標準工作站臺面采用15MM鋁板;
2)底部焊接機架采用50X50X3.2方管;
3)抽屜采用三節導軌,可全部打開,方便實訓時對控制柜的學習;
4)三聯件和開關電源安裝采用內藏式; 安全不易被碰撞;
5)上部型材門采用磁性開關檢測;正常工作開門會觸發檢測開關,設備會報警;
6)控制板采用網孔式,方便電氣元件的安裝,無需配打開孔。
7)標準工作站包括上層輸送線和下層輸送線。上下輸送線可以對換安裝;
8)采用福馬輪做地腳,一體式調節方便;
9)人機界面和開關按鈕設計在上部型材門上,方便操作。
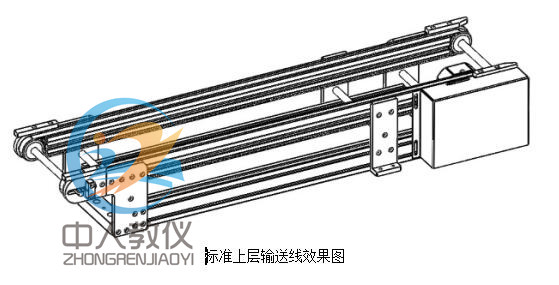
2.1.1、標準上層輸送線設計
該輸送線用于上層載具的輸送,同時可內置高精度阻擋定位機構、升降換向機構、阻擋緩存機構等,且能夠內部自由調節安裝位置。此輸送線是通過異步電機驅動同步輪,然后帶動同步帶實現移載。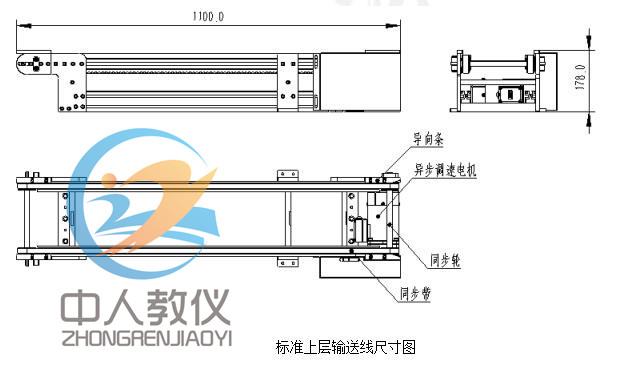
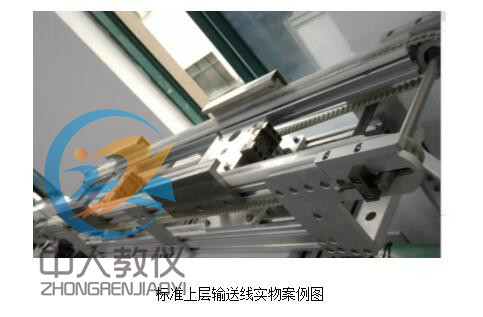
說明:
1)采用90W 異步減速調速電機驅動,同步帶傳動,速比10,速度≦30m/Min;
2)可輸送負載5KG;
3)定位機構可以在線體內部移動位置實現任意調節;
4)可以移載寬204mm的載具;
5)采用耐磨帶鋼絲的聚氨酯同步帶輸送;
6)具有等待位功能,當上一工位來料太快時,可以增加一個阻擋機構實現暫時阻檔;
7)可增加定位機構,用于實現載具定位;
8)采用型材30X30,30X60型材做主體結構;
2.1.2、高精度定位機構設計
高精度定位機構作為通用型定位組件,安裝于上層輸送線,每個單元的上層輸送線都有安裝此定位機構,通過定位機構的定位銷對載具進行精準定位。被定位的載具會在上面完成本單元的工序。此機構通過氣缸和直線軸承實現升降動作,通過氣缸和阻擋塊實現阻擋動作,通過定位銷和載具上的襯套實現定位。阻擋塊上加裝接近開關,實現到位感應。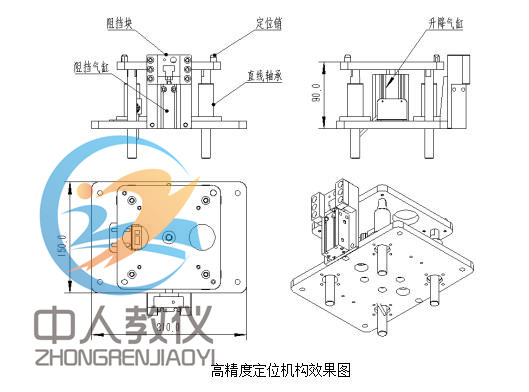
說明:
1)定位精度±0.05mm;
2)外形尺寸約為:150mmX210mmX90mm;
3)采用球型和棱形定位銷;保證精度;
4)材料采用6061鋁合金和不銹鋼材質;
5)定位銷螺絲固定時采用雙疊型墊片或加螺絲膠,防止定位銷松動;
6)定位機構可在上線體內部任意調節位置;
2.2、PLC
控制系統采用MITSUBISHI公司的Fx3u系列PLC。
2.2.1、FX3U系列PLC介紹
1) 第三代微型可編程控制器 FX3U三菱PLC2) 內置高達64K大容量的RAM存儲器
3)內置業界最高水平的高速處理0.065μS/基本指令
4)控制規模:16~384(包括CC-LINK I/O)點
5)內置獨立3軸100kHz定位功能(晶體管輸出型)
6)基本單元左側均可以連接功能強大簡便易用的適配器
2.2.2、Fx3u系列PLC主要特點
1)最大384點的輸入輸出點數可編程控制器上直接接線的輸入輸出(最大256點)和網絡(CC-Link)上的遠程I/O(最大256點)的合計點數可以擴展到384點。
2)可以連接的擴展單元/模塊
輸入輸出的擴展設備可以連接FX2N 系列的輸入輸出擴展單元/模塊。此外,FX0N/FX2N/FX3U系列特殊功能單元/模塊最多可以連接8臺。
3)程序內存
內置了64K步的RAM內存。此外, 可以通過使用存儲器盒, 將程序內存變為快閃存儲器。
4)運算指令
除了浮點數、字符串處理指令以外, 還具備了定坐標指令等豐富的指令。
5)內置RUN/STOP開關
可以通過內置開關進行RUN/STOP的操作。此外, 也可以從通用的輸入端子或外圍設備上發出RUN/STOP的指令。
6)支持RUN中寫入
通過計算機用的編程軟件, 可以在可編程控制器RUN時更改程序。
7)內置時鐘功能
內置了時鐘功能, 可以執行時間的控制。
8)支持程序的遠程調試
如果使用編程軟件(GX Developer), 可以通過連接在RS-232C功能擴展板, 以及RS-232C通信特殊適配器上的調制解調器, 執行遠距離的程序傳送以及可編程控制器的運行監控
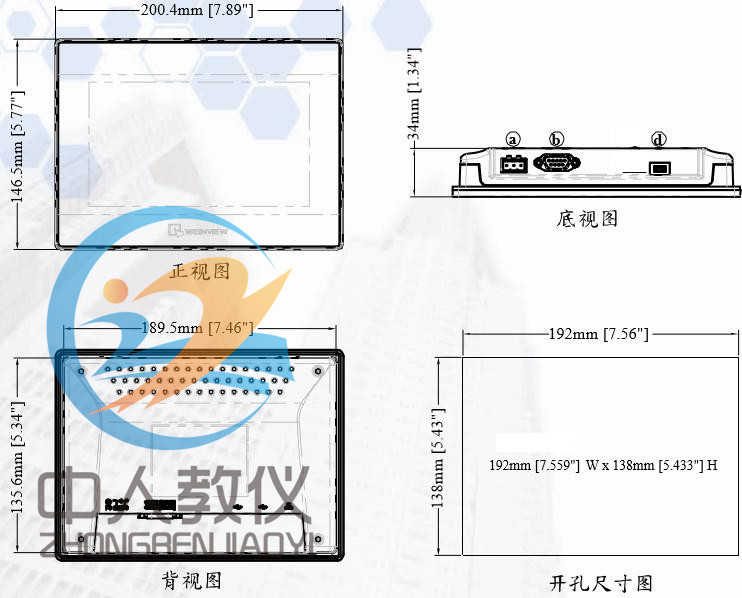
2.3、人機界面
每個PLC,都配有一臺臺灣威綸通觸摸屏,作為一機界面HMI。方便對本工作站狀態的實時查看與控制。HMI的指標如下: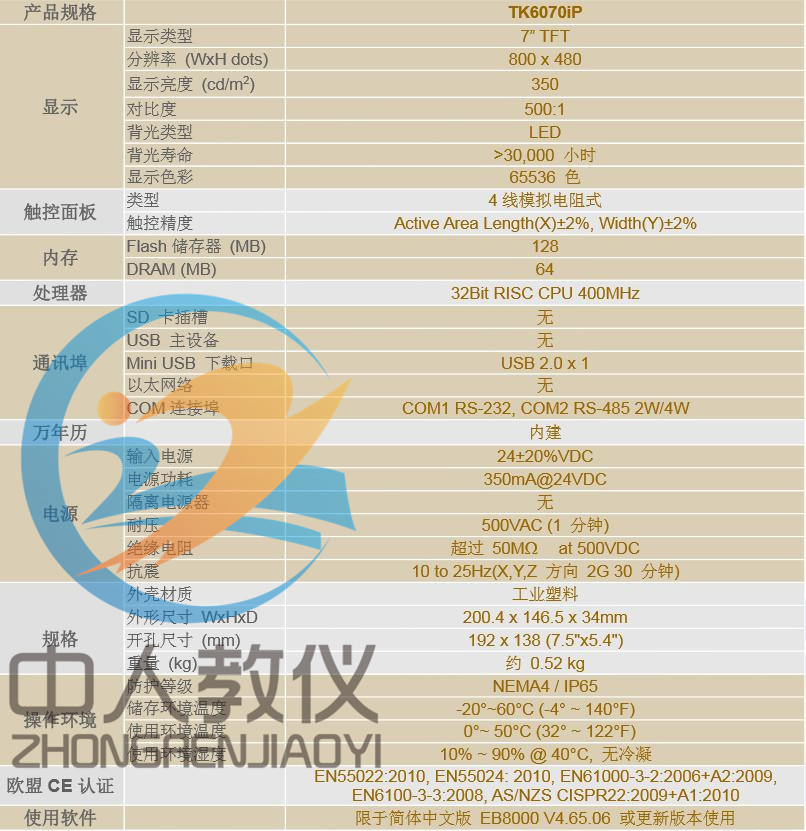

三、單元介紹與節拍
3.1、上料單元
3.1.1、單元機構設計
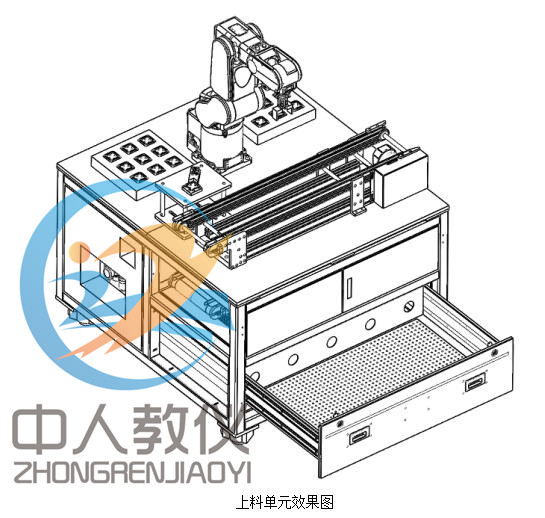
上料單元主要包括標準工作臺、底座料盤、底座工件、法蘭料盤、法蘭工件、6關節機器人、機械整形組件、真空吸盤機器人工裝組件等其他機構,主要實現底座工件整形,上料。具體如下圖: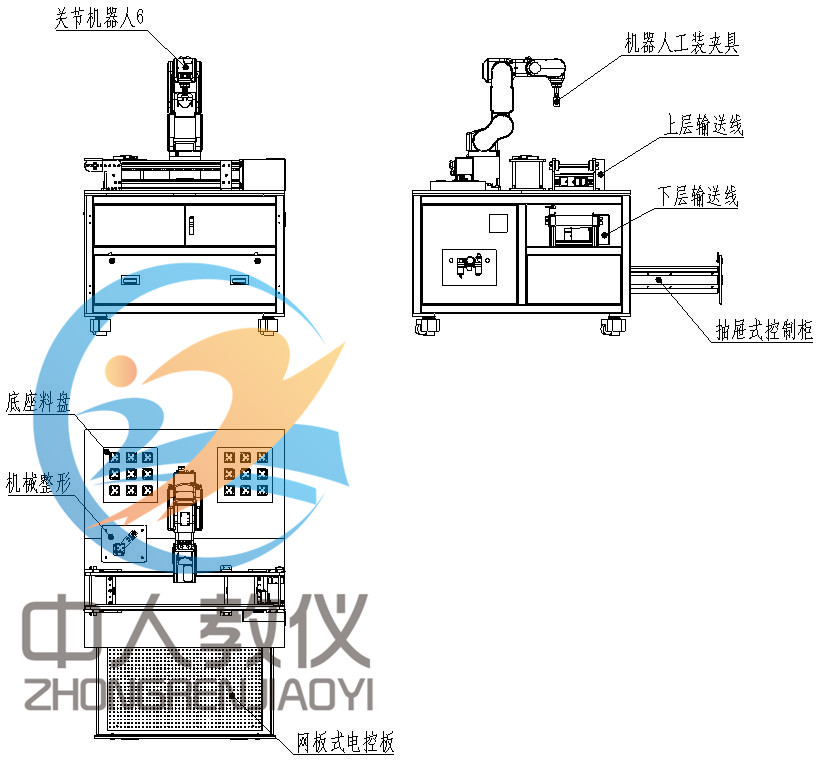
3.1.2、單元功能介紹
本單元是整個裝配柔性線的起點,主要功能是機器人從料盤取料,取出工件底座,放入到被定位的載具治具上。上料單元的執行機構主要由六關節機器人、機械整形機構、高精度阻擋定位機構、氣動夾具、同步帶流水線等構成。檢測裝置包括:負壓傳感器、接近開關、光電漫反射傳感器、磁性開關。主要技術說明:
1)六關節機器人
以便于線體的升級和機器人的應用升級,選用了本公司生產的機器人。機器人的特點:采用自主研發的運動控制器,集成各種生產工藝包,特別是集成了視覺功能,使機器人在帶視覺的應用特別方便。 根據本項目的需求,選用了6Kg級的智能視覺機器人。
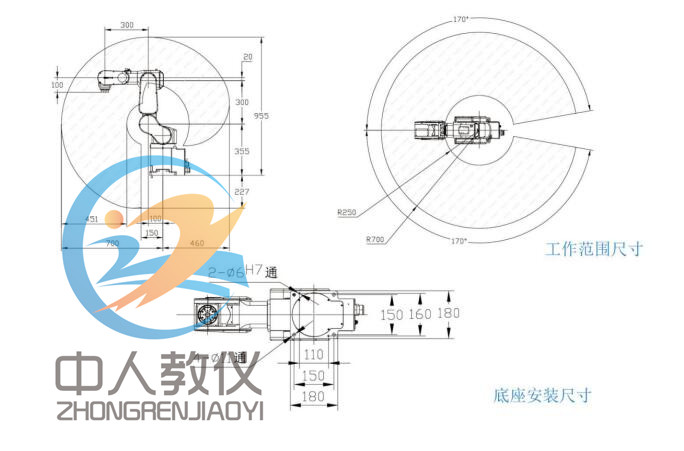
主要參數如下:

機器人不僅支持在線示教與在線編程,還支持本地通過U盤Copy程序或通過MES系統下載程序。
2)機器人工裝設計
通過氣動夾具對工件進行上下料,結構如下圖: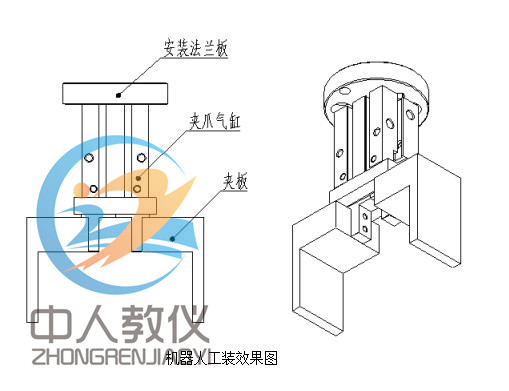
3)EtherCAT總線
工業以太網EtherCAT以高性能、靈活、同步和開放等顯著的特點得到廣泛應用。保證其研發的EtherCAT具有良好的兼容性。工業機器人就是基于EtherCAT總線系統,能方便的擴展EtherCAT外圍設備。4)高精度整形
為精確組裝,本工作臺設計一個機械整型功能。通過機械整形,精度可達0.05mm。結構如下圖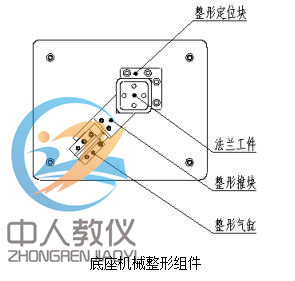

3.1.3、實驗目的
1、了解上料單元的工作過程;2、了解料盤缺料檢測;
3、了解傳動機構和執行機構的工作原理,
4、了解光電傳感器的原理和在此站的作用;
5、了解調速器對電機進行控制的原理;
6、了解同步帶輸送線(上層輸送線)的結構設計和工作原理;
7、了解平皮帶輸送線(下層輸送線)的結構設計和工作原理;
8、了解真空吸盤的原理;
9、了解載具如何被定位,高精度阻擋定位機構的設計結構和工作原理;
10、學習PLC編程;
11、了解繼電器、電磁閥等電氣元件的應用;
12、了解負壓傳感器的設置;
13、了解機械整形機構的工作原理;
14、學習6關節機器人基本編程;
15、學習6關節機器人的示教上料操作;
16、學習6關節機器人通過拖動示教上料操作;
17、PLC與機器人通訊原理;
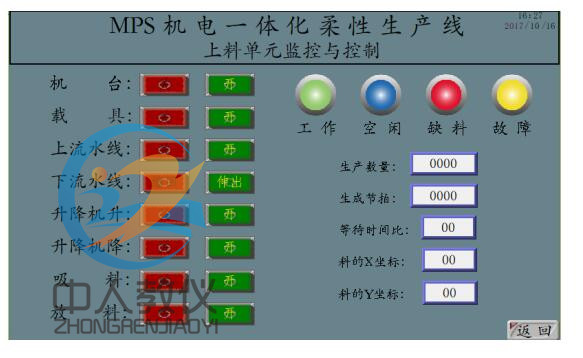
3.1.4、人機界面
3.2、鎖螺絲單元
3.2.1、單元機構定義
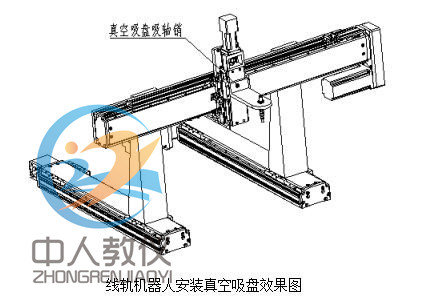
鎖螺絲單元主要包括標準工作臺、線軌直角機器人、開放式螺絲振動盤、真空吸嘴工裝組件、電批組件等結構。主要實現在工件上自動鎖螺絲。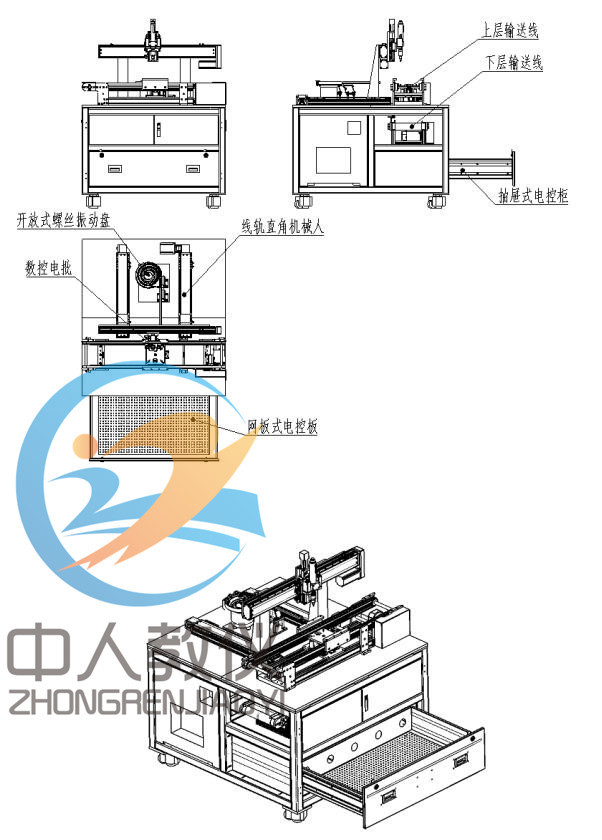
3.2.2、單元功能介紹
本單元是線軌直角機器人吸取螺絲自動放到被定位的工件上,并擰緊。開方式螺絲振動盤的功能是對螺絲工件進行連續的排列出料。該單元的執行機構主要由三軸線軌直角機器人、開放式螺絲振動盤、高精度定位機構、帶真空吸嘴的數控電批、上下層流水線等構成。檢測裝置包括:負壓傳感器、接近開關、光電漫反射傳感器、磁性開關、、光纖傳感器、原點開關,扭矩傳感器。鎖螺絲是實際工業具最基本的應用,為了兼容工具的真實性與實訓的方便性,用銷替代螺絲,用真空吸盤替代數控電批。在頻繁實訓時,可以降低工件盒的損耗。
主要技術說明:
1)線軌直角機器人
絲桿線軌設計的直角機器人驅動采用步進電機,精度可達0.03mm; 絲桿直徑16mm,導程10mm;X、Y軸采用雙線軌雙滑塊,X、Y行程400mm;Z軸行程200mm。三軸線軌直角機器人結構圖如下:
3.2.3、實驗目的
1)了解鎖螺絲單元的工作過程;2)了解傳動機構和執行機構的工作原理;
3)了解光電傳感器的原理和在此站的作用;
4)了解繼電器、電磁閥的使用方法;
5)了解調速器對電機進行控制的原理;
6)學習用PLC控制編程;
7)了解同步帶輸送線(上層輸送線)的結構設計和工作原理;
8)了解平皮帶輸送線(下層輸送線)的結構設計和工作原理;
9)了解真空吸盤的原理及應用;
10)了解載具如何被定位,高精度阻擋定位機構的設計結構和工作原理;
11)學習線軌直角機器人基本編程;
12)學習線軌直角機器人的結構原理及運用;
13)了解步進電機的原理;
14)學習電批的運用;
15)了解光纖放大器的作用與原理;
16)了解振動盤出料原理;
3.2.4、人機界面

3.3、視覺檢測單元
3.3.1、單元機構設計
視覺檢測單元主要包括標準機臺、視覺檢測、紅外掃描槍組件等機構。主要實現對組裝好的工件進行檢測和數據讀取。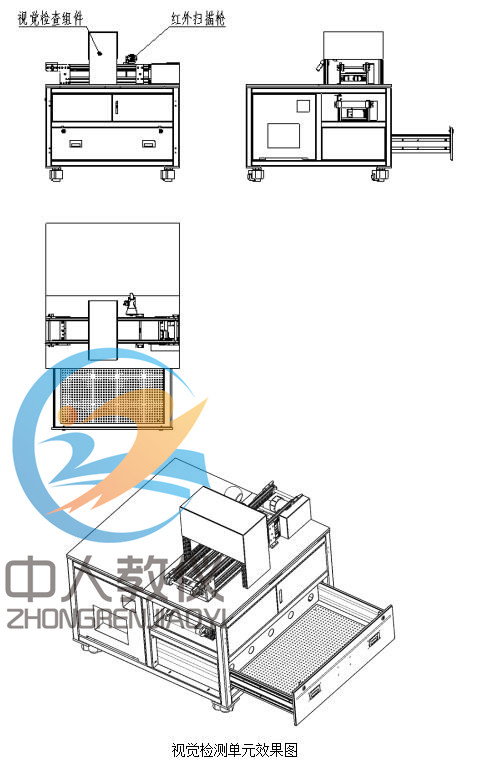
3.3.2、單元功能介紹
當載具到達本工位時,開啟檢測功能。包括檢測法蘭的尺寸是否合格,是否少螺絲(標準為4顆),以及法蘭是否是金屬材料。該單元的部件主要由金屬傳感器、工業相機、環形光源、紅外掃描槍、高精度定位機構、上下層流水線等構成。檢測裝置包括:工業相機、接近開關、光電漫反射傳感器、磁性開關。主要技術說明:
1)法蘭視覺檢測
視覺系統由視覺主機,工業相機,鏡頭,光源組成。視覺主機通過千兆網口接入多個網絡接口的工業相機。視覺主機通過Modbusu接入PLC設備,當被檢測物件到達時,PLC觸發視覺系統采樣圖像,并進行圖像處理、信號識別等先進技術。并對法蘭尺寸參數進行測量,并依據判別結果返回到上位機。視覺系統的尺寸測量,配合合適的鏡頭,能達到 um 級的測量精度。本案的配置如下:
視覺主機:10寸屏一體機
工業相機:大華A5501MG20,用500W像素,分辨率2590*2048;
相機鏡頭:16mm焦距鏡頭。工作距離:200mm;
2)法蘭缺螺絲檢測
利用視覺系統,在完成法蘭尺寸檢測后,進一步檢測4個螺絲是否安裝到位。在視覺成象中,有螺絲與缺螺絲的圖象差別明顯,可方便檢測錯是否漏打螺絲。如下圖:
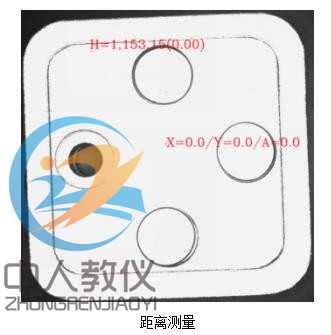
檢測原理:測量兩條線段距離,檢測工件是否合格;

2)金屬檢測
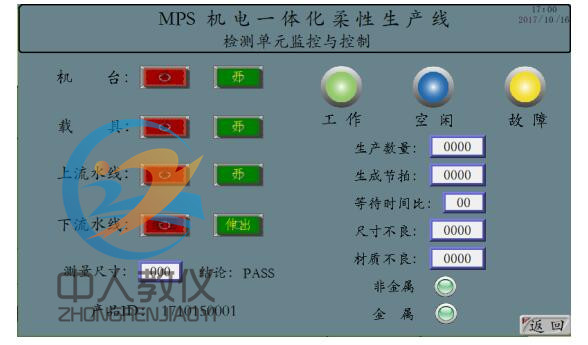
本工位帶的電容式傳感器,用于檢測法蘭蓋是否為金屬。通過HMI,可以檢測金屬是良品,還是非金屬是良品,或者二者都為良品。3.3.3、實驗目的
1)了解視覺檢測單元的工作過程 ;2)了解傳動機構和執行機構的工作原理,光電傳感器功能和在此站的作用以及繼電器的使用方法;
3)了解調速器對電機進行控制的原理 ;
5)學習用PLC控制編程;
6)了解同步帶輸送線(上層輸送線)的結構設計和工作原理;
7)了解平皮帶輸送線(下層輸送線)的結構設計和工作原理;
8)了解工業視覺的工作原理及應用,學習視覺主機的操作;
9)了解載具如何被定位,高精度阻擋定位機構的設計結構和工作原理;
10)了解光電傳感器的工作原理及運用;
11)學習掃描槍的功能,了解與上位機通訊功能,把掃描的ID,與檢測的結果上傳到上位機;
12)了解金屬檢測原理;
13)學習PLC的檢測結果與MES系統通訊;
3.3.4、人機界面
3.4.液壓單元
3.4.1、單元機構設計
液壓單元主要包括標準機臺、液壓組件、貼標簽機等機構,主要實現載具自動貼標簽。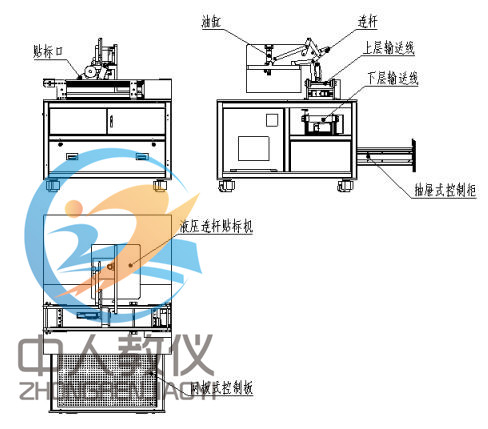
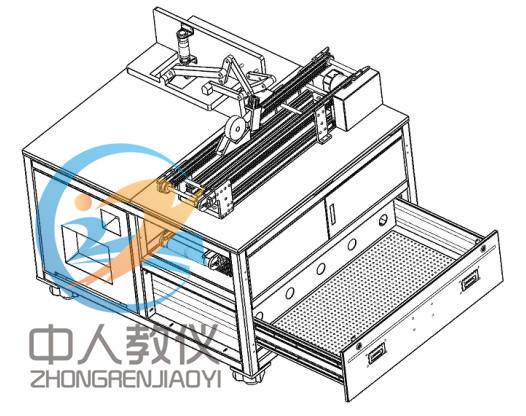
3.4.2、單元功能介紹
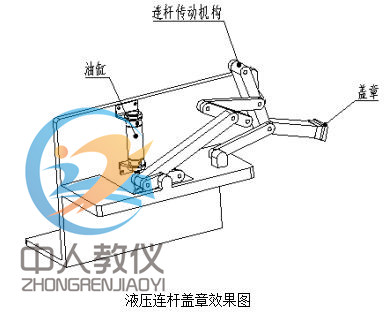
貼標簽機安裝在液壓結構上。當傳感器檢測到工件到達到本工位時,控制系統觸發液壓機構蓋章。該單元主要執行機構由油缸、氣缸等構成,檢測裝置包括磁性開關、光電傳感器、油壓檢測。
效果圖如下圖:
3.4.3、實驗目的
1)了解液壓元件的工作原理及其應用;2)了解液壓技術的基本物理知識;
3)了解液壓系統控制回路的設計;
4)學習系統的安裝調試、故障診斷及排除;
5)了解油閥以及其他油路元器件的基本知識;
6)編寫繪制該站原理圖
7)用PLC控制該站全過程操作并編寫程序
8)了解連桿傳動機構
液壓系統主要包括動力元件、執行元件、控制元件、輔助元件、液壓油,液壓系統圖如下:
3.4.4、人機界面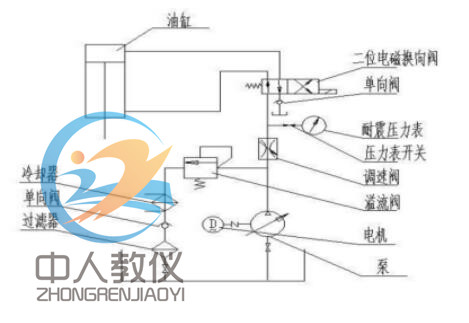

3.5分揀單元
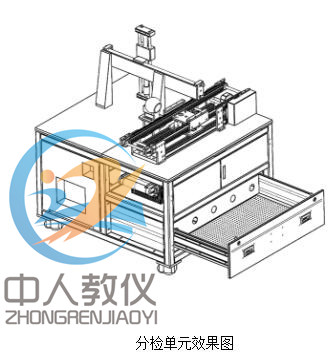
3.5.1、單元機構設計
分檢單元主要包括標準機臺、氣動直角機器人、廢料盒、紅外掃描槍、真空吸盤組件等機構。主要實現對安裝好的工件進行分檢,合格的通過,不合格的挑出。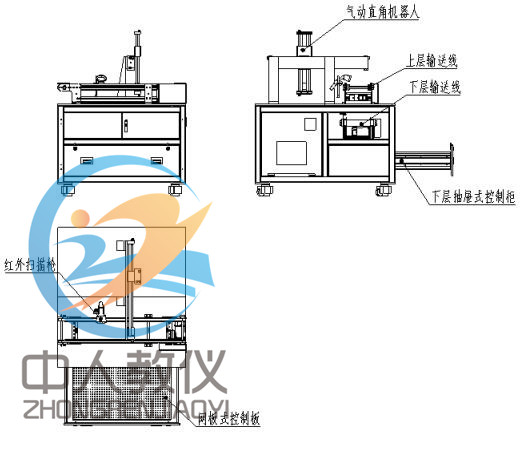
3.5.2、單元功能介紹
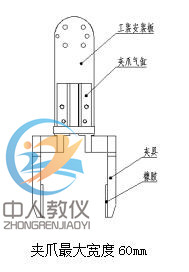
分揀單元執行機構由XZ軸氣缸,夾爪氣缸等構成。檢測裝置包括:RFID、工業相機、接近開關、光電漫反射傳感器、磁性開關。該站主要功能是:對待分檢的工件進行掃描,讀到產品的ID號。用產品的ID號,向MES請求該產品在檢測單元的檢測結果。合格產品進入下一站即升降梯立體倉庫單元,不合格產品則抓取并丟入廢料盒。主要技術說明
1)氣動直角機器人
該氣動直角機器人把不合格品從流水線放置到廢料盒。X軸氣動有效行程700mm;Z軸氣動有效行程400mm;氣壓≥0.6MPa。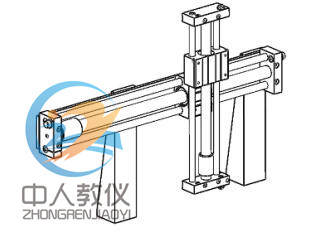
3.5.3、實訓目的
1)了解分檢單元動作:2)了解氣動機械手的氣動原理;
3)了解無桿氣缸的原理;
4)了解氣動直角機器人機械結構設計;
5)了解異步電機的工作原理和實際應用;
6)了解磁性開關和光電開關的實際應用;
7)了解電機調速器的控制方式;
8)了解電磁閥、繼電器的工作原理和應用;
9)了解紅外掃描槍的應用;
10)學習掃描槍的功能,了解與上位機通訊功能,把掃描的ID,與檢測的結果上傳到上位機;
11)學習編寫繪制該站氣路圖;
12)用PLC控制該站全過程操作并編寫程序;
13)了解該站與廢品單元、倉庫單元的通訊和編程;
3.5.4、人機界面

3.6、電梯式立體倉庫單元
3.6.1、單元機構設計
電梯式立體倉庫單元由標準工作臺、電梯式立體倉庫構成,主要實現工件自動入庫及在線顯示倉庫信息。
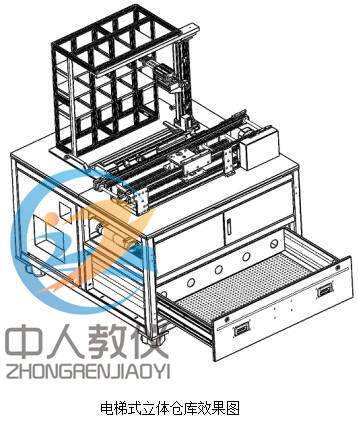
3.6.2、單元功能介紹
升降梯立體倉庫單元執行機構由氣缸、步進電機等構成。檢測裝置包括:RFID、接近開關、光電漫反射傳感器、磁性開關,該站的主要功能是:根據檢測單元的法蘭是不為金屬的檢測結果,對工件進行分類,將金屬法蘭和尼龍法蘭分別放入不同的倉庫。該單元的部件主要由高精度定位機構、上下層流水線等構成。主要技術說明
1)立體倉庫設計
支持4×4的16格庫位;總寬900~1000mm、負載12Kg。每個庫位都有傳感器,能檢測是否有料,可在線知道庫位狀態,是否空閑。工作原理:X軸是線軌模組,Y軸是氣動無桿缸,Z軸是鏈條式升降模組,工件夾取采用氣動手指,旋轉采用擺動氣缸。通過XZ的聯動,氣動手指到達對應的庫位,通過Y軸的移動和擺動氣缸以及氣動手指實現工件的進出倉。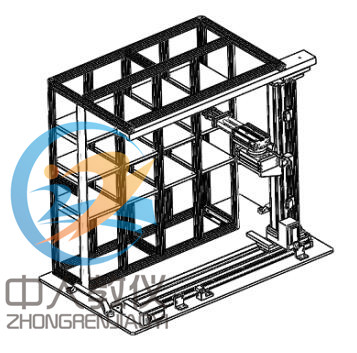
2)立體倉庫管理軟件
在MES系統里,本工位的PLC與MES系統配合,實現立體倉庫管理,具有以下功能:1、倉庫管理,定義存儲區和倉位。用以下存儲類型來表示實際的倉庫結構:
收貨區,發貨區,不良區,退貨區等不同的區;
2、從MES軟件平臺獲取立體倉庫執行命令,并下達給立體倉庫PLC,執行原料入庫、成品出庫、移庫、原料出料、成品回庫等動作。實時采集立體倉庫執行過程的各項數據,包括立庫狀態、已抓取信號、已放料信號、原料入庫請求、成品回庫請求以及各種報警信號等。
3、實時顯示立體倉庫倉位庫存,實時顯示當前執行任務及排隊任務,出入庫記錄,報警記錄等。
4、在HMI與看板上。顯示立體倉庫動態庫存,作業狀態信息顯示,可實時顯示立體倉庫的庫存與作業信息;主要顯示信息:當前任務單信息,庫位信息,物料名稱、物料編碼、出入庫倉位等。
3.6.3、實驗目的
1)了解氣動機械手的氣動原理及應用;
2)了解無桿氣缸的原理及應用;
3)了解擺動氣缸的功能及應用;
4)了解真空皮碗的工作原理和功能;
5)學習編寫繪制該站氣路圖;
6)用PLC控制該站全過程操作并編寫程序;
7)了解改站與廢品單元、倉庫單元的通訊和編程;
8)立體倉庫操作原理;
10)學習鏈條式升降的工作原理;
11)學習立體倉庫的結構設計;
12)了解步進電機的原理和編程應用;
13)了解光電傳感器、磁性開關、原點開關的工作原理和實際應用;
14)學習查看庫位信息;
15)了解電磁閥、繼電器的工作原理及應用;
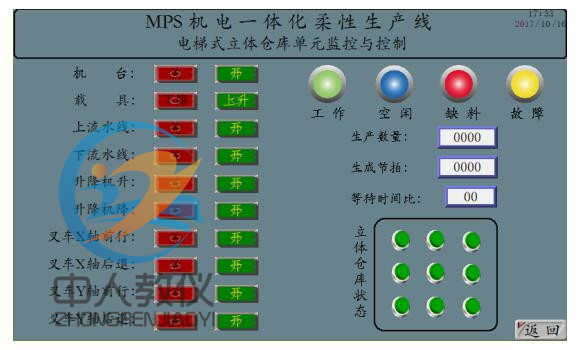
3.6.4、人機界面
3.7 轉角換向單元
3.7.1、單元機構定義
轉角換向單元主要包括2個內置換向組件的輸送線(和上層輸送線一樣)和2個線體換向組件。效果圖如下: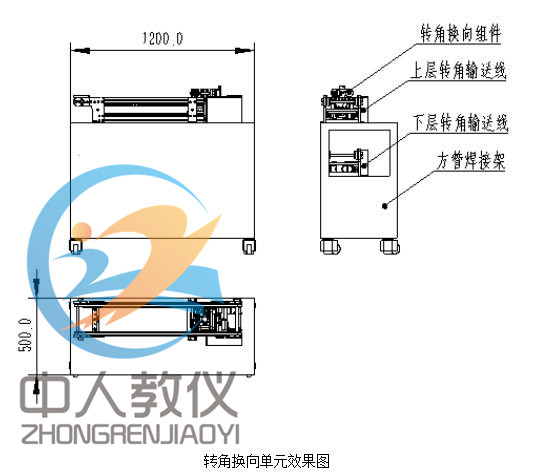
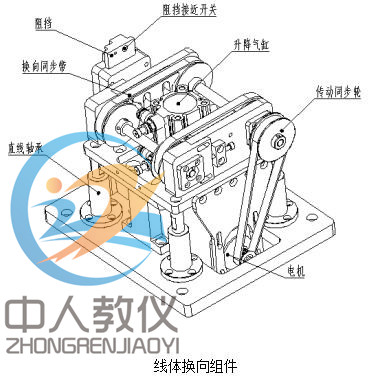
主要技術說明
1)轉角換向機體采用50X50X3.2的方管焊接。
2)可內置換向組件的輸送線(和上層輸送線一樣),技術參數和上層輸送線一致。
3)線體換向組件采用25W異步電機,速比10,可調速,速度≦30M/min;采用耐磨帶鋼絲的傳輸帶輸送。
3.7.2、實驗目的
1)了解本單元動作;
2)了解氣缸的原理及應用;
3)了解傳輸線結構和傳動原理
4)了解換向組件的結構及動作;
5)學習異步電機控制方式;
6)學習電磁閥、繼電器的應用;
6)學習本單元PLC控制編程;
7)用PLC控制該站全過程操作并編寫程序;
8)學習光電傳感器、磁性開關、接近開關的應用;
四、數字化信息總控系統
數字化信息主控系統,負責整個系統的信息收集、匯總、通訊、監控等方面工作,由管理員負責操作管理,它帶電源總控、MES軟件系統、生產電子看板、視頻監控系統,產線處的有數據均可從總控制臺收集獲取。數字化信息監控系統由以下組成:
| 序號 | 物料名稱 | 主要技術參數 | 數量 |
| 1 | 主控臺 | 2位組合,琴臺式操作臺 | 1套 |
| 2 | MES系統服務器 | Dell服務器 | 1套 |
| 3 | 無線路由器 | 300M無線路由器,2.4G/5G 雙頻段 | 1套 |
| 4 | 生產電子看板 | 42寸高清顯示器,分辨率:1920x1080 | 1套 |
| 5 | 單元攝像頭 | 紅外線、低照度網絡攝像機 | 7只 |
| 6 | 硬盤錄像機 | 8路1TB硬盤錄像機 | 1只 |
4.1、主控系統操作臺
琴臺式操作臺,高密度木質桌面、后部電氣安裝柜、采用前后開門方式設計,2位組合式,第1柜為電源總控柜與視頻監控系統、第2柜為MES系統服務器與MES系統顯示器。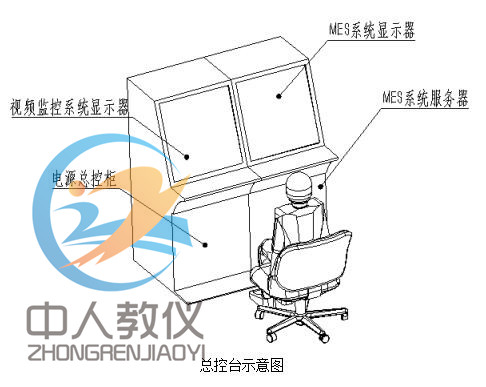
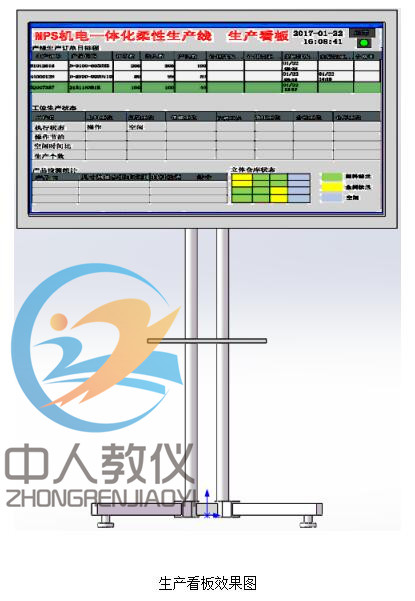
4.2、生產電子看板
生產電子看板,采用42寸大顯示屏,通過立式支架。顯示4部分內容:生產任務看板、工位狀態看板、質量看板。如下
4.3、單元攝像頭

在每個單元上增加攝像裝置,可以遠程實施監控到單元運行等實時狀態,視頻錄像機實時對單元運行視頻進行錄制存貯,形成在線教材或視頻教材內容;老師或管理人員可以遠程監測到實時加工狀態,并且可以實時指導學生教學。
主要技術說明
1.產品類型:網絡攝像機
2.產品功能:紅外線、低照度
3.有效像素:1305水平x1049垂直
4.鏡頭參數:3.6mm
5.最低照度:0.1Lux@(F1.2,AGC ON),0Lux with IR
6.水平清晰度:950TVL
7.電子快門:1/25秒至1/15,000秒
8.視頻輸出:1Vp-p Composite Output(75Ω/BNC)
9.產品電源:DC 12V±10%
10.電源功率:7W MAX
11.紅外照射距離:50-80米
4.4、硬盤錄像機
本網絡硬盤錄像機是集圖像處理技術、網絡技術、存儲技術、智能化技術和結構技術等于一體的監控存儲設備,支持主流品牌網絡攝像機的接入,可廣泛用于家庭、超市、酒店、商鋪等監控領域。
主要技術參數
1.視頻輸入:16路BNC
2.視頻輸出:VGA輸出
4.視頻幀率:PAL:25Fps,NTSC:30Fps
6.存儲:SATA接口
7.硬盤個數:2個(最大支持2T)
11.網絡管理:以太網10M/100M自適應
12.工作溫度:-10℃~+55℃
13.工作濕度:10%~90%
14.電源: DC12V
監控畫面通過一個,接在網絡硬盤錄像機接22寸顯示器,可多畫面顯示監控畫面。顯示器嵌入在1號控制臺里。
五、MES管理系統
5.1、MES系統概述
MES系統(制造執行系統)是數字化柔性加工制造的核心組成部分,與生產線系統、物流系統、工控系統等實時數據交互。能充分體現工業4.0 CPS系統核心價值,展示智能制造網絡化、信息化和智能化的核心軟件。同時該軟件與生產線、數字化看板系統、數據采集系統、一體化智能管控系統無縫對接,充分體現系統的完整性。系統采用B/S架構,可通過電腦、平板電腦、手機等終端隨時隨地遠程登錄系統;提供豐富的二次開發接口和個性化訂制服務。5.2、MES系統構架
5.2.2、MES系統模塊圖
MES帶有很強的行業特性,每行業應用差別大。本方案是以生產組裝,測試,倉儲為主的生產流程。結合柔性生產線功能,MES系統如下: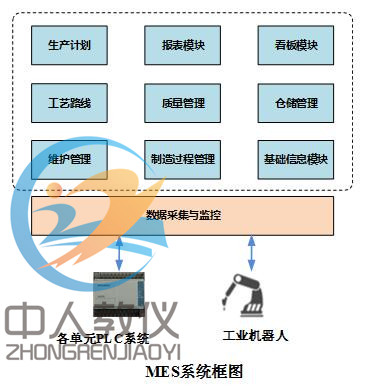
5.2.3、MES業務流程
本方案部署的MES系統,可以實現從APP下單,到生產計劃,資源調配,生產組裝,產品檢測,成品入庫。完成整個產品的生產過程。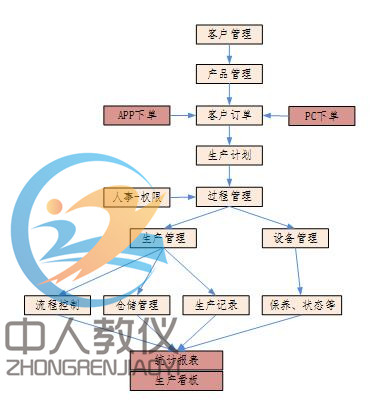
5.3、數據采集與監控
MES最大的價值就是數據和信息的轉換。如果把MES比喻為人,那么生產數據就相當于人的血液系統。數據采集和通訊功能保證了信息集成化的實施。MES不單是面向生產現場的系統,而是作為上、下兩個層次之間雙方信息的傳遞系統,連結現場層和經營層,通過實時數據庫傳輸基本信息系統的理論數據和工廠的實際數據,并提供企業計劃系統與過程控制系統之間的通信功能,是應用于企業的重要信息系統。離開生產數據采集,生產管理部門不能及時、準確地得到工件生產數量;不能準確分析設備利用率等瓶頸問題;無法準確、科學地制定生產計劃;無法實現生產管理協同。可見,只有有效地實現生產數據的采集,才能使得MES系統從根本上解決車間管理中計劃跟蹤遲滯、設備利用率低、產品質量難以提升等問題。本系統MES的數據采集,實現了PLC數據采集與機器人數據采集。PLC通過RS485總線,Modbus協議與MES服務器通訊。PLC作為單元主控系統,所有外投,如I/O,掃描槍,視覺相機等,由PLC入數據處理后,再上傳給MES系統。
5.4、工藝設計模塊
數字化工藝設計模塊,可方便導入第三方CAD等設計軟件的設計文檔和數據,自動對接物料清單,工序卡,工藝路徑。生成的工藝路線直接控制生產執行系統,生產線自動安裝工藝路徑規劃,進行傳輸與生產。本模塊具有產品基礎信息、物料清單、工藝數據三大功能。產品基礎信息包含產品規格信息,產品編碼管理;物料清單包括物料清單維護、物料清單物料查詢;工藝數據項包括工序管理和工藝路線。

5.5、生產計劃模塊
該模塊需要包括基礎參數、需求訂單預測、主生產計劃(MPS)和物料需求計劃(MRP)等項目組成。主生產計劃(MPS)項包括主生產計劃運算和主生產計劃維護;物料需求計劃(MRP)包括MRP運算、MRP維護和MRP下達等功能。通過生產計劃排單后,將生成生產工單,交給生產執行模塊執行。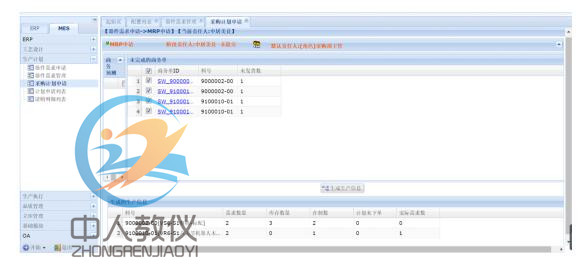
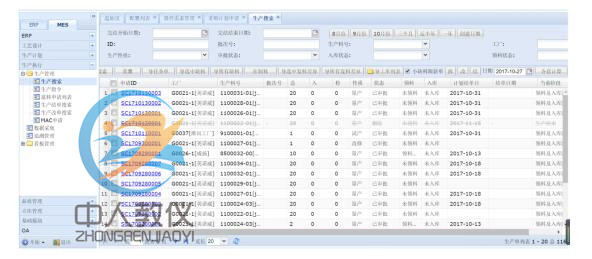
5.6、生產執行模塊
生產執行系統旨在加強MRP計劃的執行功能。把生產單通過執行系統,同車間作業現場控制系統聯動。下達到車間的生產單,自動通過自動化立體倉庫實時管控系統,下達批量出料命令,并自動給參與生產的工位下發派工單,相應工位信息終端自動更新該派工單信息,實時顯示加工指南,生產進度與所需原材料信息。生產過程中,緊密結合RFID系統,實時跟蹤生產進度,并進行生產進度管理(WIP),通過每個工位的信息終端實時采集并上傳作業時間和狀態,實時監控生產進度和作業狀態,及時發現故障和問題。質檢工位可建立工序報檢單或成品報檢單,進入質量管理模塊,進行質檢工作。
5.7、生產看板
MES看板包括四個部分:生產任務看板、工位狀態看板、質量看板。其中生產任務看板包括生產任務號、班組、線體等元素。通過該看板,我們可以及時了解生產任務的生產計劃及產成數量,以及生產節拍計時等。該看板也為生產的前期準備提供了信息,比如當天需要生產什么。質量看板顯示設備異常和生產異常信息的提示。設備看板可視化的顯示設備運行狀態。
5.8、報表管理
根據任務單號、工序信息、產品質量,設備運動行情況,分析并生成相應的數據報表統,作為生產線精益生產、工序優化、生產線平衡等提供數據報表,以便于進行生產優化及相關精益生產的實訓項目。包含:1、生產日報表:生產的每日統計報表;
2、生產月報表:生產數據的每月統計報表;
3、不良品報表:分類統計不良品類型和數據;
4、設備運行報表:自動生成設備相關運行數據報表;
5、設備運維報表:分類展現設備的運維信息;
5.9、立庫實時管理
立庫實時模塊,具有以下功能:1、管理倉庫管理,定義存儲區和倉位。用以下存儲類型來表示實際的倉庫結構:收貨區,發貨區,不良區,退貨區,等不同的區;
2、從生產執行模塊獲取立體倉庫執行命令,并下達給立體倉庫PLC,執行原料入庫、成品出庫、移庫、原料出料、成品回庫等動作。實時采集立體倉庫執行過程的各項數據,包括立庫狀態、已抓取信號、已放料信號、原料入庫請求、成品回庫請求以及各種報警信號等。
3、實時顯示立體倉庫倉位庫存,實時顯示當前執行任務及排隊任務,出入庫記錄,報警記錄等
4、倉庫看板顯示。顯示立體倉庫動態庫存,作業狀態信息顯示,可實時顯示立體倉庫的庫存與作業信息;主要顯示信息:當前任務單信息,庫位信息,物料名稱、物料編碼、出入庫倉位等。
如對本產品/文章:柔性制造系統實訓室建設方案,智能制造實訓室有任何疑問請隨時聯系我們,我們將盡力為您提供最全的實訓室建設方案和最優質的服務
本文關鍵詞:柔性制造系統實訓室建設方案,智能制造實訓室
【柔性制造系統實訓室建設方案,智能制造實訓室】是上海中人原創,如果您在了解產品的過程中受到啟發,想要咨詢相關設備的問題,我們將派專員為您解決疑問,或者您在閱讀【柔性制造系統實訓室建設方案,智能制造實訓室】中有想不通的問題,也可以咨詢我們,我們將為您提供快速解決【柔性制造系統實訓室建設方案,智能制造實訓室】問題的方案
上一篇:航空電子實訓室建設方案
下一篇:煤礦安全生產實訓室方案
這些是最新的

熱門關鍵詞

熱門排行
