

�C���ˌ�Ӗ���O��,�C���ˌ�Ӗ�ҷ���,�C���ˌ�Ӗ�b���nj��T���Ñ���Q���y���}�ģ��dz����д����ԣ��ڿ͑��M�ЮaƷ�x��ǰ���҂�һ�㽨�h�Ñ��ȿ��C���ˌ�Ӗ���O��,�C���ˌ�Ӗ�ҷ���,�C���ˌ�Ӗ�b�á��@���܌��Ñ��x���зdz���Ď�����

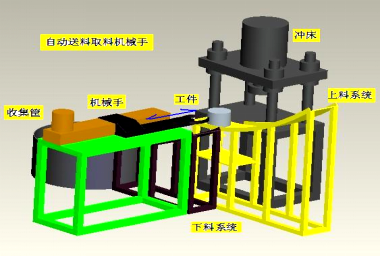
1���_��ȡ�����ϙCе��
��_����ף�ģ�M�_���C���_�����������ϼܡ��������ֳ־��̿���ϵ�y��3�S��86��57�����M늙C�͜p�ٙC�����á���צ����Cе��늚�ϵ�y��Ӗ�·�壨��늹�����W�����W�T���_չ�Cе��늚�;���Ӗ����
�_��ȡ�����ϙCе�֣�������ϵ�y������ϵ�y���ռ���늿�ϵ�y�Ȳ��ֽM�ɡ������^�̣�����ϵ�y��һ�������x�����Cе�֊Aȡ��������_��ָ��λ�ã����_�������˻أ��_���_���������Cе�֊Aȡ�����͵�����ϵ�y�ռ����Cе�֏�λ��
���Ĺ��̽̌W���ݣ��_��ȡ�����ϙCе�ֵĘ��ɣ����M늙C�����Ԫ���x�Cе�Y���M�Ϻ��b�䣬���̷��������Ԫ�����ƣ�늚�������OӋ���b�ȡ�
2����әCе��
����̌W�Cе�ֿ���ɣ������צץȡ���ϣ��ֱ����¡������Ƅ��������צ���D180�ȵȄ�������15·�ֳ�ʾ�̾��̿��������V�������̌W�����С����I���a���Ԅ�ץȡ���ϡ��г̶�λ�ʴ_���\�пɿ����S�����I�Cе�����Ԅӻ��İlչ�Լ���Ӽ��g������һЩ���c����әCе���ѽ��V�����������a�Ԅӻ��ĸ����I����
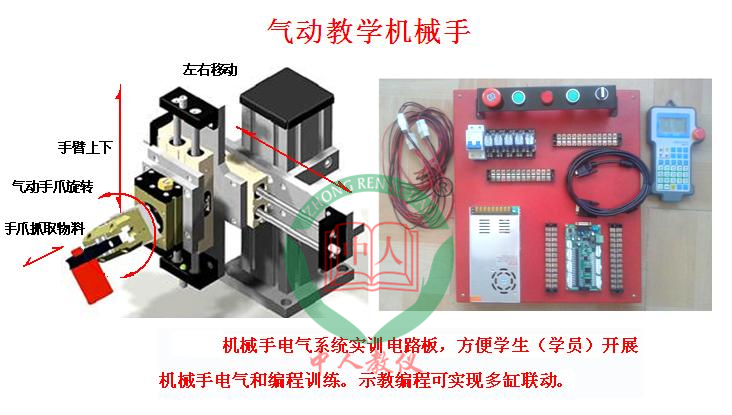
��әCе�օ�����
������ʽ �̈́�ʽ
ʹ�����w �՚�
ʹ�É������� Kgf/cm2 (KPa) 1.5~9(150~900)
X�S����s�� ���¿����p�U�p�S���_���STMB32-150
Z�S�����£� ���¿����p�U�p�S���_���STMB20-80
���D�S��R�S�� �㽭��WCRQ2BS15-180�����D���D���
��צ �㽭��W20Dƽ���_�]��צ
���b��ʽ ���氲�b
���w�|�� 38kg
�ߴ� �����L*��*�ߣ�310*310*380mm
���� 0.2KW
����Դ 220V��50Hz��

����ʾ�̾��̣��Ɍ��F��������ܷ���������ʹ���f������
����ϵ�y��
��������w�eС���������^����������������������AMD��˾16λ����CPU��ϵ�y푑��ٶȿ죬�������ƾ��ȸ���ϵ�y������5.128��64�c�LCD���|Һ�����r����������Ӣ���@ʾ���˙C�����Ѻ���һ����PCB�����ČӰ��NƬ�Y�������ɔ_����������ʹ�øɽ��c��̖�����I��λ�Cݔ�롢ݔ�����B�ӣ���������ɔ_���S���ı��o���ܣ��Ԅәz�y�C���\����r�����r�@ʾ���ψ�����ԭ�_���C����ʹ�ð�ȫ������ݔ����·���o���ܣ���Ч��ֹ���ⲿ�·��·��ɵēp����
���ã���Cе��늚�ϵ�y��Ӗ�·�壨��늹�����W�����W�T���_չ�Cе��늚�;���Ӗ����

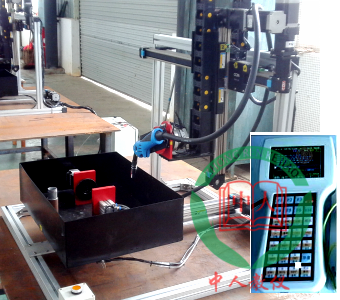
3��5�S�ԄӺ����C���C
5�S�ԄӺ����C���C����ֱ���P���Y������X Y Z R1 R2 5�S�M�ɣ����M늙C�ӣ������ؓ�d3����؏Ͷ�λ������0.1mm�����A�����S��ʾ�̾����Ϳ���ϵ�y��2�c�_�����gֱ����3�c�_�����g�A���������̣����٘������ӡ�Ϳ�z�C���ˡ�

���g������
�Ŀ ����
���ɶ� 6�S
�ӷ�ʽ 5���M늙C��
��Чؓ�d 3kg
�؏Ͷ�λ���� ��0.05 mm
�˜���Ч�\�ӷ���
X 350 mm
Y 330 mm
Z 250 mm
R1��90��
R2��250��
�~���ٶ�
X�S 180 mm /s
Y�S 180 mm /s
Z�S 160 mm /s
R1�S 45��/s
R2�S 45��/s
�܇��h�� �ض� 0��45��
��� 20��80�������Y¶��
��� 4.9m/s2����
���b��ʽ ���氲�b
���w�|�� 72kg
�C�ܲ��| ���÷��䓽Y��������
����ϵ�y���c��
1��6�S�ӣ�����5.6��Һ��������ISO���H�˜�G���a��
2�����ö��Ӿ�·�壬32λ�����ܵ�CPU�ͳ���Ҏģ�ɾ�������FPGA��ϵ�y��������ˇ���ñ��NԪ�������Ķ�ʹ����ϵ�y����o����
3�����ö��_20�����\��ָ��_�^�\�ӿ���оƬ���e�m�ϸ��ٶྀ�λ�A���B�m���a���\�ӿ��ƣ�
4��24·ݔ�룬12·ݔ���ӿڣ�
5��ȫ������x�����ɔ_�ԏ����\�з�����
6�����քӣ��Ԅӣ��w�㣬������������
7����ͨ�^�I�P���Cе���M��������ʾ�̾��̵Ļ��A�ϣ�ָ�]�������M/�ŷ�늙C���ָ���Ą�����
8��ʾ�̾����^��֧�ֽ^��λ�á�����λ�á��ӕr���ȴ�����IO��ݔ����̖����������IO��ݔ����̖�������ѭ�h�{�õȵȡ�
9�����Ô��ֽ������M늙C�ӷ�ʽ���m�Ͼ��ȸߡ�
���ֳ־��̿���ϵ�y����Cе��늚�ϵ�y��Ӗ�·�壨����늹�����270�������C��

4��ģ�K�ɲ��b6�S�̌W�C����
����6���C���p����, ����צ; �ɲ��b,����W����Ӗ��

ģ�K���ɲ��b6�S�̌W�C�����əC���˱��w��늚����ϵ�y������ܛ����Ӌ��C�Ȳ��ֽM�ɡ����ڙC���˻��A�J֪���Cе���ֿɲ��b��늚ⲿ�ֿ����ڹ��I�C���˵Ŀ��ơ����̌�
ģ�K6�S�C�����������S,6�����ɶ�,����ģ�K�M��ʽ���_朽Y�������C���˸��P�����������D�P��ģ�K���Ƅ��P��ģ�K�M�ϴ��B�ӣ���D��ʾ������6�����M늙C�ӡ��F�|�����������X���ֱ۽���̎�������㌍Ӗ���b�� ���P��ʽ�Y��ʹÿһģ�K�ɪ��������\�У��ɽM�ϳ�3-6���ɶȲ�ͬ���ܙC���ˣ������ؓ�d1�����ģ�K�Ă������؏Ͷ�λ������0.5mm����λ�ʴ_���\�о��ȸߡ��C���˸�ģ�K���ò��M/�ŷ�늙C�ӣ���ͨ�^6�S�C���˿���ϵ�yʹ�C��������M�ϳ�3��6���ɶșC���ˣ��܉��ڹ������g������λ�þ��_��λ��

ϵ�y���c��
1��6�S�ӣ�����8���ɫҺ��������ISO���H�˜�G���a��
2�����ö��Ӿ�·�壬32λ�����ܵ�CPU�ͳ���Ҏģ�ɾ�������FPGA��ϵ�y��������ˇ���ñ��NԪ�������Ķ�ʹ����ϵ�y����o����
3�����ö��_20�����\��ָ��_�^�\�ӿ���оƬ���e�m�ϸ��ٶྀ�λ�A���B�m���a���\�ӿ��ƣ�
4��24·ݔ�룬12·ݔ���ӿڣ�
5��ȫ������x�����ɔ_�ԏ����\�з�����
6�����քӣ��Ԅӣ��w�㣬������������
7����ͨ�^�I�P���Cе���M��������ʾ�̾��̵Ļ��A�ϣ�ָ�]����늙C���ָ���Ą�����
8��ʾ�̾����^��֧�ֽ^��λ�á�����λ�á��ӕr���ȴ�����IO��ݔ����̖����������IO��ݔ����̖�������ѭ�h�{�õȡ�

������B��
�Ŀ ����
���ɶ� 6���ɶ� 6���M늙C������6���C���p���������F6�S��ģ�K���Y�����ɽM��3-6���ɶșC���ˣ����m��η��Ͳ��b
���̷�ʽ ʾ�̾���
��Чؓ�d 1kg
�؏Ͷ�λ���� ��0.5 mm
���̷�ʽ
�\�ӷ���
J1�S ��120��
J2�S ��120������65��
J3�S ��85������130��
J4�S ��160��
J5�S ��95��
J6�S ��250��
�~���ٶ�
J1�S 40��/s
J2�S 45��/s
J3�S 45��/s
J4�S 35��/s
J5�S 35��/s
J6�S 25��/s
�܇��h��
�ض� 0��45��
��� 20��80�������Y¶��
��� 0.1mm/s���°��b��ʽ
���氲�b���w�|�� 48kg
���w�ߴ� 380*330*900
�Դ 220V
���� 500W
������䣬��2ָ��צ������Դ��
�C���˸�ģ�K�ɲ��b,����W����Ӗ����ͨ�^6�S�C���˿���ϵ�yʹ�C��������M�ϳ�3��6���ɶșC���ˣ��܉��ڹ������g������λ�þ��_��λ��

5��6�S�C����

�ҹ�˾6���ɶ�ͨ�ù��I�Cе�֙C���ˣ����ô�ֱ���P�����B�C���p���P���Y�����ŷ�/���M늙C�ӣ������ؓ�d3����؏Ͷ�λ������0.5mm��
����6·ʾ��������ϵ�y�����ƾ��ȸߣ����ܷ�������ֱ���P�����B�Y�����\���`���Ҫ�������̌W�����к����I���a�Ї���������ʰȡ�Ͱ��\�����I��
ϵ�y���c��
1��ģ�K����ܛ���OӋ��6�S�ӣ�ʾ�̾�����������ISO���H�˜�G���a��
2�����ö��Ӿ�·�壬32λ�����ܵ�CPU�ͳ���Ҏģ�ɾ�������FPGA��ϵ�y��������ˇ���ñ��NԪ�������Ķ�ʹ����ϵ�y����o����
3�����ö��_20�����\��ָ��_�^�\�ӿ���оƬ���e�m�ϸ��ٶྀ�λ�A���B�m���a���\�ӿ��ƣ�
4��12·ݔ�룬24·ݔ���ӿڣ�
5��ȫ������x�����ɔ_�ԏ����\�з�����
6�����քӣ��Ԅӣ��w�㣬������������
7����ͨ�^�I�P���Cе���M��������ʾ�̾��̵Ļ��A�ϣ�ָ�]�����ŷ�늙C���ָ����܉�E������
8��֧�ֽ^��λ�á�����λ�á��ӕr���ȴ�����IO��ݔ����̖����������IO��ݔ����̖�������ѭ�h�{�õȵȡ�
9�������S���Ô��ֽ����ŷ�/���M늙C�ӷ�ʽ���m�Ͼ��ȸߡ�
���g������
�Ŀ ����
���ɶ� 6
�ӷ�ʽ 2�ŷ�4���M늙C��
��Чؓ�d 3kg
�؏Ͷ�λ���� ��0.5 mm
�\�ӷ���
J1�S ��120��
J2�S ��120������65��
J3�S ��85������130��
J4�S ��160��
J5�S ��95��
J6�S ��250��
�~���ٶ�
J1�S 45��/s
J2�S 40��/s
J3�S 45��/s
J4�S 45��/s
J5�S 45��/s
J6�S 40��/s
�܇��h�� �ض� 0��45��
��� 20��80�������Y¶��
��� 4.9m/s2����
���b��ʽ ���氲�b
���w�|�� 122kg
���w�ߴ� 480*330*1200mm
���ã����צ����늚�ϵ�y��Ӗ�·�壨����늹�����W�����W�T���_չ�Cе��늚�;���Ӗ����
��Ҫ�������̌W�����к����I���a�Ї���������ʰȡ�Ͱ��\�����I��
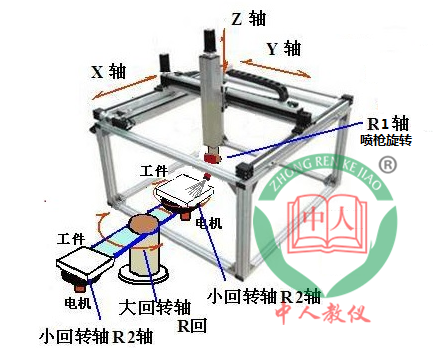
6�� 6�S������Ϳ�C����

���g���c���ԄӴ_�����g�A��܉�E�����㘋����Ϳ��Ϳ�z�C���˽Y���M��
6�S������Ϳ�C���˲���ֱ��������ʽ����X��Y��Z�����^���DR1���������DR2�������_���D�_���DR3 6�S�M�ɣ����á����S��3Dʾ�̾����Ϳ���ϵ�y����������c�_�����gֱ�����������c�_�����g�A����
�˙C�����Ѻã������������������õĹ������������؏Ͷ�λ���ȡ�0.05mm����늚�����䡣����Դ��220V��50Hz���Դ������1KVA��ϵ�y�惦����������������Ҫ���������x�����x�������
�C�����c��
1������6�S��3Dʾ�̾����Ϳ���ϵ�y��������c�_�����gֱ�����������c�_�����g�A�����M����g������Ϳ��
2�����T�ܘ����ߏ����X�Ͻ��܉�����C�ܲ��÷��䓽Y�������ᣬ�C�����w�����Թ����ã��T��С���ӑB���ܷ������L�r�gʹ�ò�׃�Σ�ʹ��λ���Ⱦ��_��
3������Ƥ�����ӣ��侫�����Ǻ��C���p�ٙC����������ٶȺ͎�ؓ�ɵ�������
4����늚�ϵ�y��Ӗ�·�壨����늹��乤�����D�_��֧�ܡ�
�aƷ���g����
|
�����Ŀ |
����ָ�� |
�����Ŀ |
����ָ�� |
|
���ɶ� |
6 |
���b��ʽ |
���T�����b |
|
���̷�ʽ |
ʾ�̾��� |
���w�|�� |
120g |
|
��Чؓ�d |
3kg |
���w�ߴ� |
1200*550*350 mm |
|
�ӷ�ʽ |
1�ŷ�5���M늙C�� |
�؏Ͷ�λ���� |
��ؓ0.05 mm |
|
|
|||
|
�\�� ���� |
X�S 900mm |
�~�� �ٶ� |
500mm/s |
|
Y�S 300mm |
500mm/s |
||
|
Z�S 180mm |
300mmm/s |
||
|
R1�S ��180������180�� |
R1�S 40��/s |
||
|
R2�S ��120������120�� |
R2�S 40��/s |
||
|
R3�S ��180������180�� |
R3�S 40��/s |
||
��Ҫ����
X�S늙C����1���ŷ�늙C����ͬ���X�Ύ��ߏ��Ⱦ��܌�܉���ӣ�Y��Z�S���ò��M늙C�ӣ��������ǜp�ٙC�p�٣�ͬ���X�Ύ��ߏ��Ⱦ��܌�܉���ӣ�R1��R2 ��R3�S�����ò��M늙C�ӣ������C���p�ٙC�p�١�
������Ӗ������
��؛��ؓ؟���M��Ӗ������ֱ���_����������ˮƽ��ֹ���O�䱣��1�꣬�K���S�ޡ�
�����������
1���ԄӇ���1��
2��6̖���20��
3��10������Ͱ1��
4��24V늴��y1ֻ
5����������2��
6�������1�_����늚�ϵ�y��Ӗ�·�壨��늹�

7�����Sƽ��C����

ƽ��C�����ɜp�ٙC�����M늙C����ף�צ�����A�ߵ�����M�ɣ�
ƽ���P���͙C���ˌ��Fƽ��ȶ�λ�Ͷ���һ���Ƅ��P�������Fĩ�˼������\�ӡ����w�Cеϵ�y�ɻ������ֱۺ�ĩ�ˈ��������ֽM�ɣ�ÿһ���ֶ����������ɶȣ�������һ�������ɶȵęCеϵ�y���������л��D�C�������P�������ֱ��ɴ�ۡ�С�۽M�ɣ�ĩ�ˈ��������ֲ�����һ���Qצʽ�ֲ��Y�������C���˾��и߄��ԡ��߾��ȡ����ٶȡ����b���gС���OӋ���ɶȴ�ȃ��c�����ԽM�b�ɺ��әC���ˡ��c�z�C���ˡ���W�z�y�C���ˡ��÷řC���˼�����C���˵ȣ��Ķ������ڸ�Ч�ʵ��b�䡢���ӡ��ܷ⡢���\���÷ŵȄ�����
����г�400mm�� ���ؓ�d2KG���˙C�����Ѻã������������������õĹ������������؏Ͷ�λ���ȡ�0.05mm����늚�����䡣����Դ��220V��50Hz���Դ������500KVA��ϵ�y�惦����������������Ҫ���������x�����x�������
�C�����w�����Թ����øߏ����X�Ͻ��⚤���������T��С���ӑB���ܷ������L�r�gʹ�ò�׃����
���Ĺ��̽̌W���ݣ�ƽ�����ϙCе�ֵĘ��ɣ��ŷ�늙C�����Ԫ���x�Cе�Y���M�Ϻ��b�䣬���̷��������Ԫ�����ƣ�늚�������OӋ���b�ȡ�
����צ���՚��o�s�C�����\�ù����ȡ�